Line Feature-based Object Recognition for Textureless Indoor Objects
People
Sung-Kee Park
Publication
Gunhee Kim, Martial Hebert, and Sung-Kee Park
Preliminary Development of a Line Feature-based Object Recognition System for Textureless Indoor Objects
in Springer-LNCIS Publication “Recent Progress in Robotics: Viable Robotic Service to Human.” S. Lee, I. Hong Suh, M. Sang Kim (eds.), 2007. (Selected papers from the 2007 International Conference on Advanced Robotics (ICAR 2007))
[Link]
Description
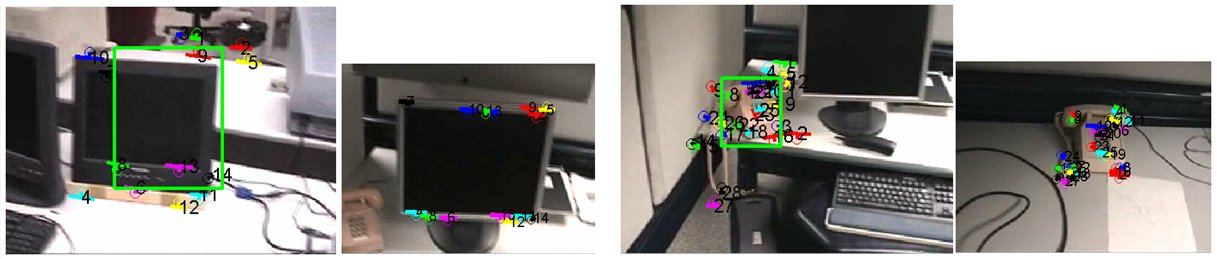
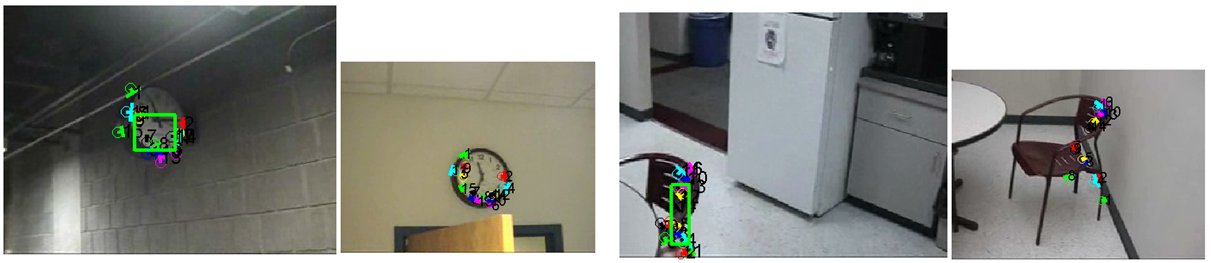
The goal of this project is to develop a textureless object recognition system for an indoor mobile robot. Our approach relies on 1) segmented line features, and 2) pairwise geometric relationships between them. This approach is motivated by the fact that many objects to be handled by an indoor robot have little textures on their surfaces, but have strong geometrical consistency within the same object class such as refrigerators and microwave ovens.
Given a test image, we perform image matching with all training image, and retrieve the best-matched training image. Our matching method consists of two steps. First, we find correspondence candidates between linear fragments of test and training images. Second, a spectral matching algorithm finds the most-consistent subset of correspondence candidates. Both matching methods are learnt by using logistic classifiers.
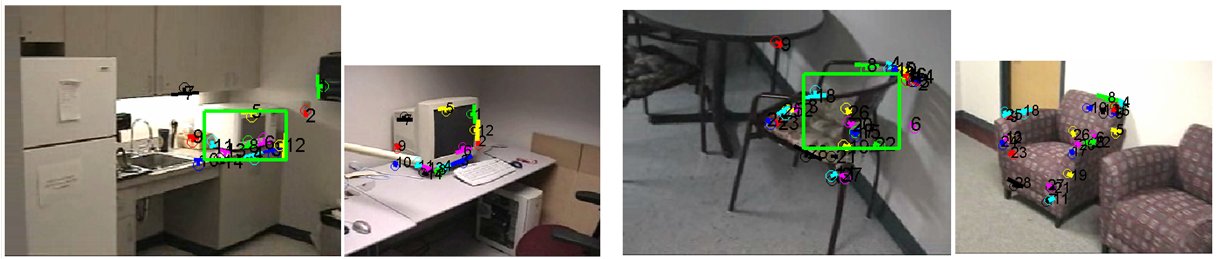
We evaluated the developed recognition system with our own database, which consists of eight indoor object classes - refrigerators, microwave ovens, monitors, phones, printers, sofas, wall clocks, and wiry chairs. The images were taken in kitchens and hallways at CMU. We also compared the detection performance of our line feature based method with a SIFT feature based one. Experiments showed that the line features are superior in our problem - the detection of textureless objects. The database is composed of 40 labeled training images for eight object classes (i.e., five images per object class), and 145 test images. Fig. 2 shows that our recognition system is robust despite the variation of object instances, clutters, illumination, and partial views to some extent. Fig.3 shows some examples of failures. Apparently, monitors are quite similar to rectangular shaped objects, especially microwave ovens. This kind of confusion occurs with other pairs of objects such as sofawiry chairs, and fridgeprinters as well.
 |
  |
 |
Funding
Intelligent Robotics Development Program, a 21st Century Frontier R&D Programs by the Ministry of Commerce, Industry, and Energy of Korea.